研究開発
当社の創業以来のDNAである
「創造と挑戦」を担う、
技術開発の数々をご紹介します。

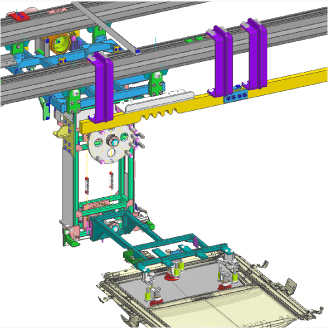
高精度非接触同期
製品説明
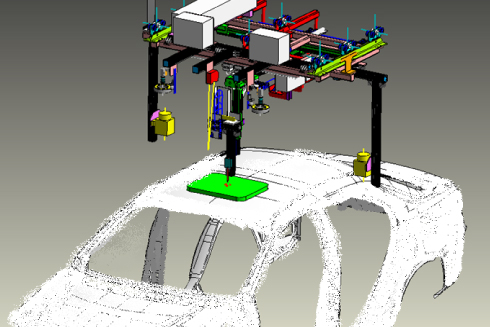
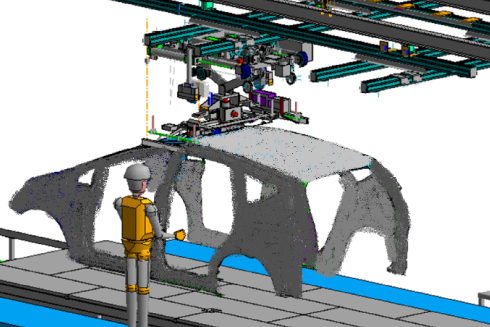
自動車組立ライン向けに開発した、車両コンベアと吊り設備の高精度同期装置です。
従来のコンベアに設けたエンコーダ値によるトラッキング方式では5~10mm程度の誤差が発生していました。本技術ではカメラを用いた位置トラッキングを応用し、0.75~1.5mmの誤差に抑えることに成功しました。これにより、同期走行中の挟まれリスクの低減や車両への自動作業が可能となりました。
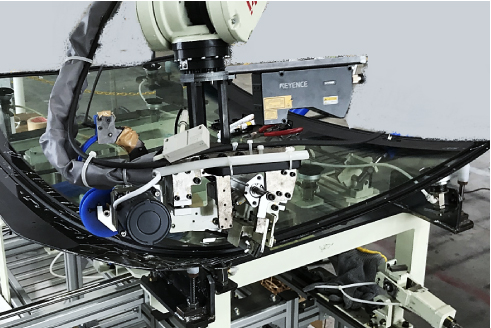
ガラス搭載支援ロボット
製品説明
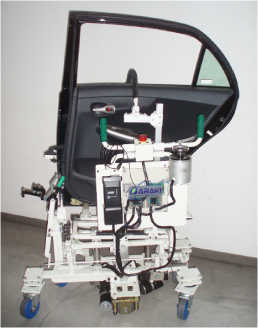
従来は息の合った熟練作業者2人で行っていた、自動車へのガラス貼付け作業を作業者1人とロボットとの協働で行う技術です。大きく以下の3つの技術が使われています。
- 作業者の操作力を力覚センサで入力しインピーダンス制御を行う「スキルアシスト技術」
- 操作力の大きさによって粘性抵抗を変化させる「操作力依存可変ダンピング制御」
- 操作力方向に応じてガイド機能をON/OFFする機能
 日本ロボット学会 2011年 実用化技術賞受賞
日本ロボット学会 2011年 実用化技術賞受賞
日本ロボット学会誌, Vol.28, No.5, pp.624-630, 2010.
ゴムシール自動貼り付け
製品説明
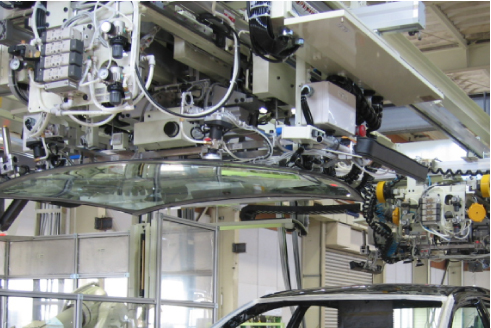
自動車のFr/Rrガラスへゴムシールを自動で貼り付ける技術です。曲面上の接着面に沿って、ほぼ一定圧をかけながらロボットが貼付けます。
ガラスのアルコール洗浄やプライマー塗布などの前処理工程と併せて自動化することにより、自動車のガラス搭載工程全体を自動工程としてシステムアップすることが出来ます。
ロボット速度 200mm/secにおいて貼付け精度±0.5mmを達成しております。
からくりチャック
製品説明
ロボットや搬送装置ではワークを把持するために、ハンドと言われる把持装置を用います。本技術では、からくり機構を用いてハンドの開閉を外部動力レスで実現しました。
これにより先端部の軽量化と、先端部への配線が不要となり装置全体のスリム化に大きく寄与いたします。
なお、エンジン部品を用いた耐久試験では、10万回以上の耐久試験をクリアしています。

からくり反転機
製品説明
従来は装置の走行動作と反転動作をそれぞれの駆動モーターで制御していましたが、本技術ではローラーピニオン&ラック機構を用いて走行駆動力を反転軸に伝達させることで、1つのモーターで走行と同時に反転動作を実現しました。
トヨタ自動車東日本株式会社 2016年度 技術開発賞受賞
オムニ台車
製品説明
オムニホイールと呼ばれる全方向車輪とアシスト機構を融合させた駆動ユニットです。低推力モーターを使用し、姿勢を保ったまま360°全方向に操作できるため床面を走行するタイプの装置に組み込むことが出来ます。